📚 Publications
2025
"Continual Learning for Multimodal Data Fusion of a Soft Gripper", N. Kushawaha, E. Falotico; Advanced Robotics Research, Wiley — Paper link
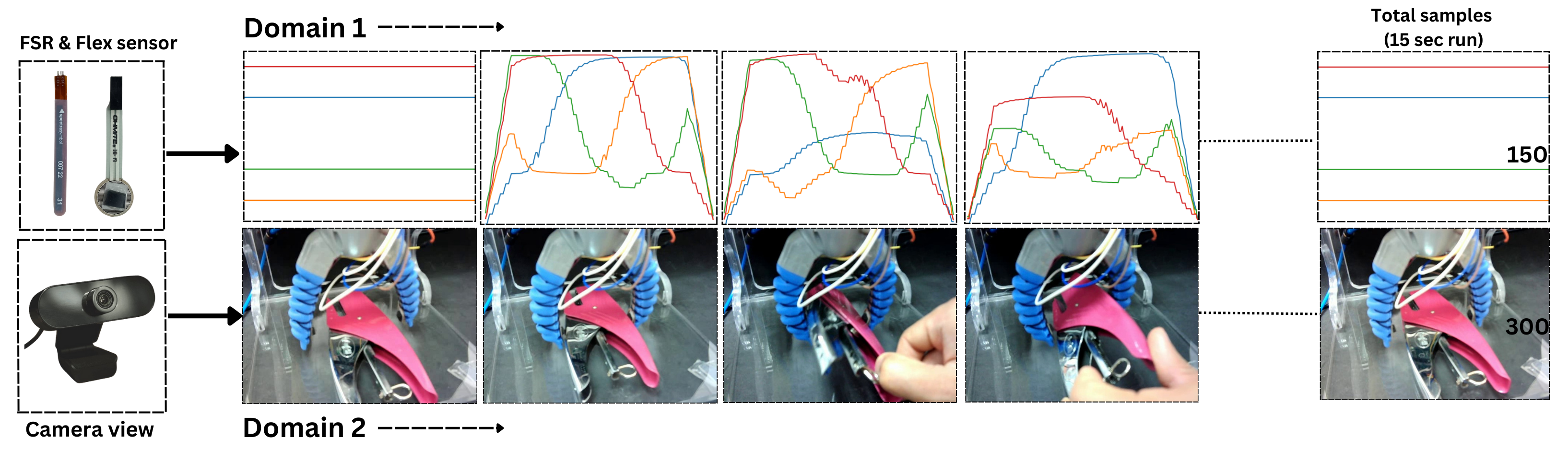
In this work, we developed a continual learning framework for multimodal semi-supervised learning, allowing new sensing modalities to be integrated incrementally without retraining from scratch. Demonstrated the effectiveness of our proposed approach on a soft pneumatic gripper equipped with force, bend, and vision sensors, synchronized through ROS framework.
"Domain Translation of a Soft Robotic Arm using Conditional Cycle Generative Adversarial Network", N. Kushawaha, C. Alessi, L. Fruzetti, E. Falotico; IEEE International Conference on Robotics Systems and Application 2025 — Paper link
In this work, we developed a control algorithm based on a conditional cycle generative adversarial network to transfer a pose controller from a standard simulation environment to a domain with tenfold higher viscosity. The approach was evaluated in simulation on the I-Support soft robotic arm for trajectory tracking tasks.
"Adaptive Drift Compensation for Soft Sensorized Finger Using Continual Learning", N. Kushawaha, R. Pathan, N. Pagliarani, M. Cianchetti, E. Falotico; IEEE Robosoft 2025 (Accepted) — Paper link
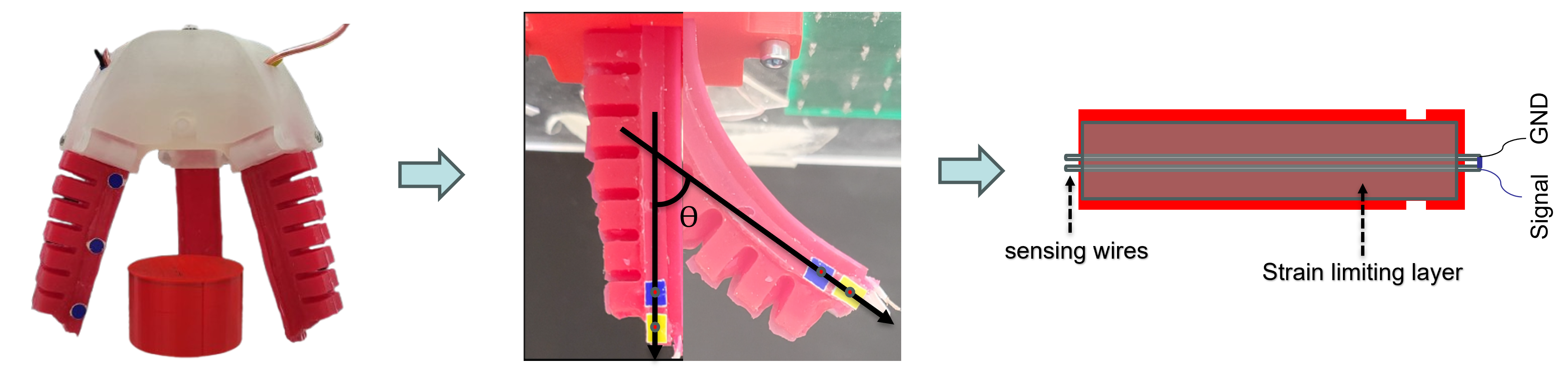
In this work, we developed an adaptive continual learning algorithm to model the drift present in a soft finger with piezoelectric based sensor embedded inside it for proprioception. The algorithm models together the inherent drift present in the sensor as well as the non-linearity of the soft structures in an online manner.
2024
"SynapNet: A Complementary Learning System Inspired Algorithm With Real-Time Application in Multimodal Perception", N. Kushawaha, L. Fruzzetti, E. Donato, E. Falotico; IEEE Transactions on Neural Networks and Learning Systems — Paper link
In this work, we developed an algorithm inspired by CLS theory, combining a fast learner with a slow consolidator, enhanced by a VAE-based pseudo-episodic memory. The approach integrates lateral inhibition to suppress redundant neuronal activity and employs a sleep phase to reorganize learned representations. We demonstrated its effectiveness in real-time object classification using proprioceptive signals from a soft sensorized gripper operating in a dynamic environment with an unknown number of classes.
2022
"Separation of electrons from pions in GEM TRD using deep learning", N. Kushawaha, Y Furletova, A Roy, D Romanov — Paper link
"A study of Artificial Neural Network and its implementation from scratch", N. Kushawaha, A. Roy — Paper link